







2024(令和6)年9月11日に第11回ロボット大賞(The 11th Robot Award)の受賞者が発表されました。このうち、理工学部 教授 國井 康晴らが開発に携わる「超小型月面探査ローバLEV-1&LEV-2」が「文部科学大臣賞」を受賞しました。
「第11回 ロボット大賞」受賞一覧 https://www.robotaward.jp/winning/index.html
ロボット大賞は、将来の市場創出への貢献度や期待度が高いと考えられるロボット及びロボットに関連するビジネス・社会実装、ロボット応用システム、要素技術、高度ICT基盤技術、研究開発、人材育成を表彰することにより、ロボット技術の開発と事業化を促進し、技術革新と用途拡大を加速する、社会に役立つロボットに対する国民の認知度を高め、ロボットの需要を喚起するとともに、全国から広く募ることで我が国のロボット技術の動向を把握することを目的として設けられています。
経済産業省、一般社団法人日本機械工業連合会、総務省、文部科学省、厚生労働省、農林水産省、国土交通省の共催により行われています。
※引用出典:ロボット大賞ホームページ
今回の受賞内容は、以下の通りです。
受賞対象
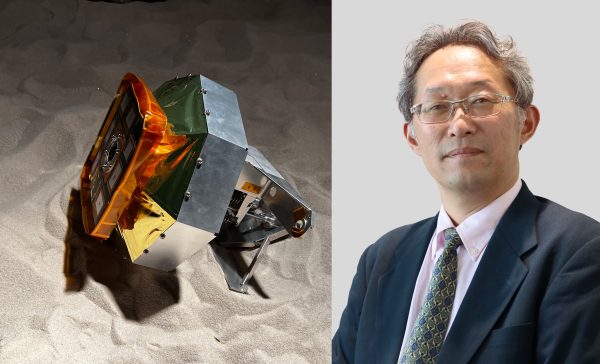
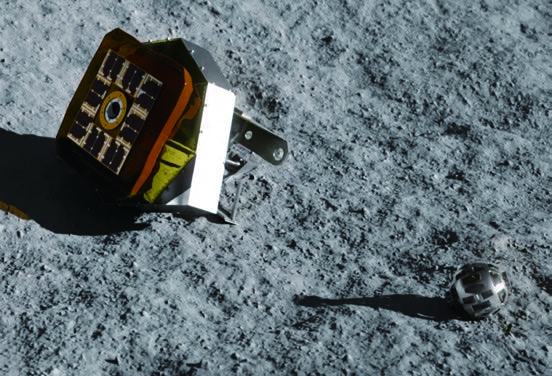
超小型月面探査ローバLEV-1&LEV-2
受賞者
国立研究開発法人宇宙航空研究開発機構(JAXA)/中央大学/国立大学法人東京農工大学/同志社大学/株式会社タカラトミー/ソニーグループ株式会社
概要
日本初の月着陸機SLIMに搭載された超小型月面探査ローバ(LEV)が、月面で連携してミッションを遂行した。LEVシステムはLEV-Mと2台のローバ(LEV-1とLEV-2)で構成され、2024年1月、SLIM探査機の着陸直前にLEV-1とLEV-2が独立して月面に展開された。LEV-1は単一の車輪で方位制御や跳躍移動を行い、環境状態の観測を実施。LEV-2はSLIM探査機を発見し、その画像を撮影してLEV-1に送信しながら周囲を走査した。LEV-1はデータを地球へ直接送信する能力を持ち、LEV-1は世界初の跳躍移動型ロボット、LEV-2は世界最小・最軽量(質量228g)の月面探査ロボットとして、完全自律での月面活動・ロボット間通信・地球へのデータ送信に成功した。
評価のポイント
人類の活動領域拡大に向け、月惑星探査のニーズが高まっているなかで、今回の月面探査ミッションでは、月面での自律変形・移動(跳躍)、LEV-1などの自律撮影・地球への画像送信が達成された。 また、今後、宇宙開発、月惑星探査は、民間での技術開発も期待されるなかで、小型化・コストダウンを実現した。これらの成果は、今後の月面探索につながる成果であるとともに、今後の宇宙開発、ひいては科学技術の発展に大きなインパクトを与えるものである。
この表彰式が、「Japan Robot Week 2024」の会期初日(同年9月18日)に東京ビッグサイトで行われ、國井教授らが式に参列し、受賞者を代表してJAXAの大槻 真嗣 准教授らが表彰状とトロフィーを授与されました。
國井教授がプロジェクト・マネージャーを務める内閣府ムーンショット型研究開発事業についてや、研究室で取り組む研究内容について興味をお持ちの方は、下記もご覧ください。
内閣府ムーンショット型研究開発事業 目標3の研究開発プロジェクト「未知未踏領域における拠点建築のための集団共有知能をもつ進化型ロボット群」Webサイト