2024年1月20日午前0:20(日本時間)、月面に着陸間際の小型月着陸実証機「SLIM(Smart Lander for investigating Moon)」から超小型天体観測用ローバ「LEV-1」が分離され、取得したテレメトリデータ用語1)の分析により、月面での活動が行われたことが確認されました。
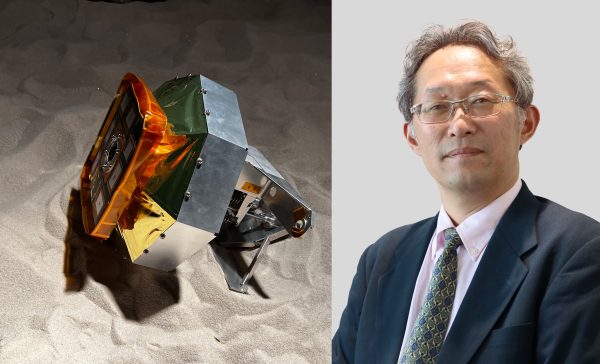
「LEV-1」は、理工学部教授 國井康晴らが宇宙航空研究開発機構(JAXA)、東京農工大学と共同開発したもので、約2kgの機体を月面でホップ(跳躍)させながら自律的に移動し、月面や「SLIM」の撮影を行い、データを地球に直接送信する計画になっていました。
テレメトリデータによると、「LEV-1」は「SLIM」から分離されたあと、計画していた月面での跳躍移動や地上局との直接通信(共に分離されたローバ「LEV-2」のデータ含む)を行いました。現在、「LEV-1」は、太陽光パネルから得る予定だった電力が不足したため月面で待機しており、月面画像の取得と地上への送信を試みたものの、現時点で月面画像が確認できていない状況です。今後、太陽光が照射される向きの変化により、活動を再開する可能性があることから、引き続き「LEV-1」からの電波を受信する体制を維持する予定です。
SLIM月面着陸の詳細については、 JAXAプレスリリース「小型月着陸実証機(SLIM)の月面着陸の結果について)」(2024年1月20日付)および「小型月着陸実証機(SLIM)搭載 超小型月面探査ローバ(LEV-1)月面着陸の結果・成果等について」 (2024年1月25日付) をご覧ください。
なお、「SLIM」から分離された後、「LEV-2」がSLIMおよび周辺環境を撮影し、「LEV-1」の通信機で地上に転送した下記の画像が、JAXAプレスリリース「小型月着陸実証機(SLIM)の撮影およびデータ送信に成功」(2024年1月25日付)で公開されています。

今回「LEV-1」は、約38万km彼方の月面から地球までデータの直接通信に成功した世界最小・最軽量の観測機となりました。加えて、月面での跳躍移動、月面ロボット間通信、完全自律機能も実現したことは、世界初の快挙と言えます。
現在、國井教授は、内閣府ムーンショット型研究開発事業の目標3「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」において「未知未踏領域における拠点建築のための集団共有知能をもつ進化型ロボット群」のプロジェクトマネージャを務めています。今回の「LEV-1」の成果は、今後、月面探査の実現に向けたロボット開発に活かされます。
用語1)テレメトリデータ:宇宙観測機器と地上の間で行う測定データの遠隔通信のこと。

日本初の月面探査ローバLEV-1、LEV-2と言う2台の親子プローブの連携による探査が実現しました。親プローブLEV-1が地球と直接通信しながら月面で6回の跳躍によって移動し、子プローブLEV-2とも通信して取得した着陸後のSLIM探査機の画像を地球に送信できた事を大変嬉しく思います。
LEV-1と呼ばれる様になる小型ロボットの構想、月面探査ローバ技術の研究開発を開始してから20年以上が経過してしまいましたが、ついに願いが叶いました。我が国の月面ロボット探査における一つのマイルストーンを刻めたのではないかと思っております。諦めずに共に歩んだ研究者仲間たち、支援してくれた皆さん、応援してくれた皆さんに対し、感謝の気持ちでいっぱいです。
今回のLEVの技術的遺伝子は、内閣府ムーンショット型研究開発制度にて我々の研究開発プロジェクトが目指す、複数ロボットの群れによる月面探査技術の実現にも引き継がれています。また、さまざまな形で月惑星探査の領域を越えて受け継がれる事になると思いますので、未来のLEVの子孫達の活躍にも期待し、見守って頂ければ幸いです。
そして、いつかこの歴史的瞬間を共有した若者達と一緒に研究できる時が来ることを願っております。
國井 康晴
國井教授の研究内容について興味をお持ちの方は、下記もご覧ください。