







Outline
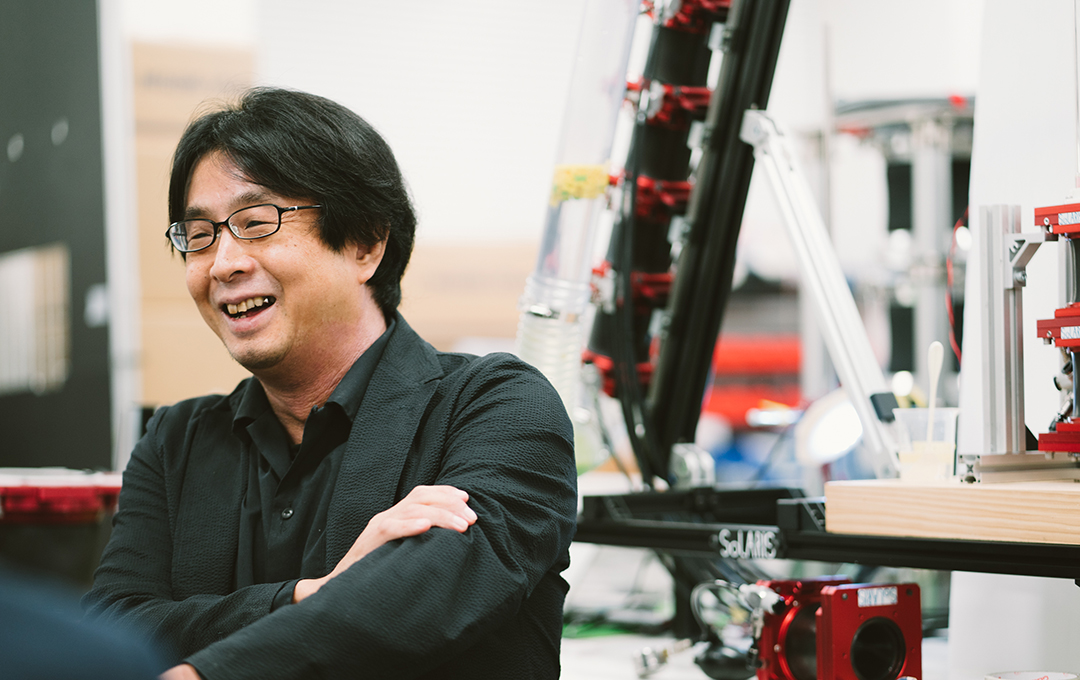
ミミズのように這うロボットが床に並ぶのは、理工学部精密機械工学科の中村太郎教授のバイオメカトロニクス研究室。生物らしい柔らかいロボットで狭い空間を調べたり、さまざまなものを運んだりできます。企業からの共同研究の依頼も多く、現在は約20の共同研究が進行中。「斜め上からの提案があるからこそ共同研究をやる価値がある」と話す中村教授が、柔らかいロボットのしくみや応用先について語ります。
Robots that can crawl like earthworms are lined up on the floor of the Prof. Taro Nakamura’s Biomechatronics Laboratory, which is part of the Department of Precision Mechanics in Chuo University’s Faculty of Science and Engineering. These lifelike soft robots can inspect small spaces and carry various things. The laboratory gets many requests from companies to engage in joint research and has about 20 such projects currently underway. “Joint research is worth doing because we get proposals from obliquely upward,” said Professor Nakamura while discussing the mechanisms of soft robots and their applications.

中村 太郎
理工学部 教授
1975年生まれ。2003年信州大学大学院工学系研究科博士後期課程修了。1999年、秋田県立大学助手。2004年、中央大学理工学部専任講師, 2006年、同大学准教授をへて、2013年より同大学教授。2017年中央大学発ベンチャー株式会社ソラリスを設立。同社CEO、現在に至る。
Taro Nakamura
Professor, Faculty of Science and Engineering, Chuo University
Taro Nakamura was born in 1975.In 2003, he completed the Doctoral course in the Graduate School of Science and Technology, Shinshu University. In 1999, he worked as Research Associate in Akita Prefecture University. In 2004, he worked as Full-time Lecturer in the Faculty of Science and Engineering, Chuo University. In 2006, he worked as Associate Professor in the Faculty of School of Science and Engineering, Chuo University. In 2013, he assumed his current position. In 2017, he established Solaris Inc. (a venture company originating from Chuo University.) He is also working as a CEO at Solaris Inc.
生物の動きやはたらきを取り入れて柔らかいロボットを作る
Creating soft robots by incorporating the movements and functions of living things
—— 中村先生の研究テーマを教えてください。
Q: Prof. Nakamura, please tell us about the themes of your research.
中村教授(以下、敬称略):柔らかいロボットの研究をしています。柔らかいロボットは、天然ゴムや炭素繊維などの素材を使い、空気圧で膨らんだり縮んだりできる人工筋肉からできています。軽量でも大きな力を発揮できるのが特長です。
Prof. Nakamura (hereinafter without honorifics): I research soft robots. This type of robot is made of materials like natural rubber and carbon fibers, which are used to create artificial muscles that can swell and contract using air pressure. Their advantage is that they can exert large amounts of force while being lightweight.
企業などと柔らかいロボットを医療や製造業などの分野に応用する研究もしています。
We also conduct research with companies and other entities on how to apply soft robots in fields such as medicine and manufacturing.
——柔らかいロボットは、普通のロボットとはどう違うのですか?
Q: How is a soft robot different from a normal robot?
中村:工場などにある産業用ロボットは、高速で高精度な動きを繰り返すという点においては優れています。しかし、決まった動きしかできず、ぎこちないですよね。また、壁などにぶつかると壊れるので、ぶつからないようにセンサーを多く使って高度な制御をしなければいけません。
Nakamura: Industrial robots in factories excel at repeating high-speed, high-precision movements. However, they are somewhat crude because they can only make predetermined movements. Also, they get damaged if they run into a wall or other similar obstacles, so they require precise control using a large number of sensors.
一方、我々の開発している柔らかいロボットは、ぶつかっても大丈夫なくらい柔らかく、シンプルな制御システムで構成されています。そのため、複雑で変わりやすい環境にも適応できます。例えば、ミミズの形をしたロボットは、曲がりくねった細い管の中を進ことができます。人間の腸の仕組みを真似た蠕動(ぜんどう)運動ポンプは、液体と固体を混ぜながら運ぶことができます。
On the other hand, the soft robots we are developing are soft enough that they can run into things and have simple control systems. Therefore, they can be adapted to complex and changeable environments. For example, earthworm-shaped robots can travel through thin, winding tubes. Peristaltic pump robots that mimic how the human intestinal tract works can carry liquids and solids while mixing them together.
このように、生物の動きやはたらきを取り入れるロボット工学のことを「バイオロボティクス」といいます。月面や深海などの極限環境でも動くロボットも開発しています。
A subfield of robotics that incorporates the movements and functions of living things is called “biorobotics.” We are also developing robots that can work in extreme environments like the surface of the moon or deep under the sea.
また、リハビリ用ロボットやパワーアシスト装置にも応用するソフトロボティクスの研究も行なっています。
We are also investigating potential applications for soft robotics in rehabilitation and as power assist devices.
ミミズはどうやって地面を這うのか?
How do earthworms crawl?
——バイオロボティクスは生物型ロボットの研究というわけですね。中村先生が生物型ロボットの研究を始めたきっかけは何ですか?
Q: Biorobotics is the research of robots with biological features, correct? What made you start researching biological robots?
中村:もともと私は制御系の研究をしていて、中央大学に来る前は秋田県立大学で助手(現在の助教)をしていました。秋田県立大学は田んぼの中にあり毎日歩いて通っていたのですが、ある日ミミズが畦道を這っているのをずっと見ていると、不思議な動きをしていることに気づきました。ヘビやシャクトリムシとはまた違う動きをして地面を這うのです。
Nakamura: Originally, I was researching control systems, and before coming to Chuo University, I was an assistant (currently assistant professor) at Akita Prefectural University. The university’s campus sits in the middle of rice fields, and I would walk to my laboratory every day. One day I was watching an earthworm crawl on a path between some paddies when I noticed something interesting about its movements. The way it crawled on the ground was different than how snakes and inchworms moved.
気になったので調べてみると、ミミズは150くらいの体節からできていて、体を垂直に包む環状筋と、体と平行に走る縦走筋という2つの筋肉層を交互に動かしていることを知りました。体節を「細く長く」「太く短く」することができ、この収縮をうまく使って蠕動運動という方法で前に進みます。これをロボットに応用できないかと考えたのが、私の生物型ロボット研究の始まりです。
This made me curious, so I looked it up and found out that an earthworm’s body has about 150 segments, which alternate between two muscle layers: circular muscles that surround the body perpendicularly and longitudinal muscles that run parallel to the body. These segments can be used to make the body “thin and long” or “thick and short.” Skillfully employing these contractions enables them to move forward in a peristaltic manner. I wondered if this could be applied to robots, which was the beginning of my research on biological robots.
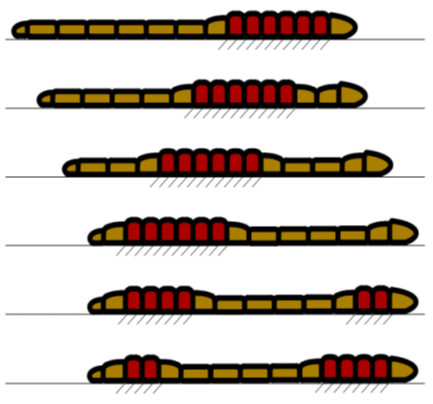
An earthworm’s segments can be used to make the body “thin and long” or “thick and short,” which allows them to move forward in a peristaltic manner.
当初は何かの役に立つというよりは、ミミズ型ロボットを作ってみようと考えただけでした。プロトタイプを発表してメディアに取り上げられるようになると、今まで縁のなかった企業などからお声がかかるようになりました。それを機に、ミミズ型ロボットにはさまざまな使い道があるのだと実感しました。
Rather than making anything useful, at first, I just wanted to make an earthworm-type robot. When we released a prototype and it was covered by the media, we started hearing from companies that we had had no previous connections with. This made me realize that earthworm-type robots could have various uses.
——ミミズ型ロボットにはどのような特長があり、産業応用につながっていくのですか?
Q: What are the characteristics of earthworm-type robots that will lead to industrial applications?
中村:利点は3つあります。まず、狭い空間を移動できる、おそらく唯一の手段です。ヘビは横幅が、シャクトリムシは高さが必要です。その点、ミミズは体の断面とほぼ同じ径の空間を移動できます。
Nakamura: They have three advantages. First, they can move in tight spaces. Possibly, this is the only way to do this. Snakes require width and inchworms require height. In this respect, earthworms can move in spaces with diameters that are almost the same as the diameter of their bodies.
次に、牽引力が高いことです。現時点での最新のミミズ型ロボットは大きいものなら50kgくらいの物を引っ張ることができます。
Second, they can generate considerable traction. Large versions of our latest earthworm-type robot can pull objects that weigh about 50 kilograms.
最後に、中を空洞にできることです。さまざまな機器を搭載できるので、この点が産業応用するときには大きな特長となります。例えば中にカメラを搭載して管の中などを自走する検査ロボットなど、とてもユーザビリティの高い検査ロボットができると思います。
Finally, they can hollow things out. These robots can be equipped with various devices, which is a great advantage in industrial applications. We have the potential to create highly usable robots, such as, for example, a self-propelled inspection robot equipped with a camera that can travel inside tubes and other spaces.
これらの特長をもつミミズ型ロボットには大きな可能性があります。ミミズ型ロボットを見て「これに使えるかもしれない」と、琴線に触れた人が声をかけてくれているようです。
Earthworm-type robots with these characteristics have great potential. People approach us after getting inspired by seeing an earthworm-type robot, which made them think of other possible uses.


An earthworm-type robot that can move inside a tube with a diameter of 150 millimeters.
図面すらない下水道管を調べる
Inspecting sewer pipes without a map
——ミミズ型ロボットは、具体的にはどのような応用例があるのですか?
Q: What are the specific applications of earthworm-type robots?
中村:国土交通省からの補助金で研究しているミミズ型ロボットは、下水管を調べることができます。下水道管が老朽化すると、漏水や道路陥没の原因となります。配管の図面すらない場合があり、十分にメンテナンスができてないところもあります。
Nakamura: An earthworm-type robot we are researching using a grant from the Ministry of Land, Infrastructure, Transport and Tourism is capable of inspecting sewer pipes. When sewer pipes deteriorate, it can result in leaks and even cause roads to collapse. In some cases, no diagrams of the pipes are available and there has been insufficient maintenance.
検査では工業用の内視鏡が使われているのですが、細く曲がりくねった下水道管では奥まで入っていけずに十分に検査されていません。水道管が曲がるところで、壁とケーブルの摩擦によって進めないからです。
Industrial endoscopes are currently used for inspections, but proper inspections are not possible because they cannot travel to the end of narrow and winding sewer pipes. This is because the friction generated between the wall and the cable where pipes bend can halt their advance.
ミミズ型ロボットなら、曲がりくねったところにも入っていけます。ロボットの周囲にブラシをつけて管内を清掃でき、先端にカメラがあるので撮影もできます。将来的にはメンテナンス機器もつなげて補修できるロボットを目指しています。
Earthworm-type robots can get into winding areas. If brushes are placed around the robot, they can clean the inside of the pipes and cameras attached to the ends can provide images. In the future, we want to create robots that can perform repairs by equipping them with maintenance devices.
下水道管だけでなく、化学工場の細い配管も検査できます。今はPoC(概念実証)の段階で、2022年度中に私が創業したスタートアップ企業「株式会社ソラリス」で製品化することを目指しています。もし製品化できれば、ミミズ型検査ロボットとして世界初になります。
These can be used not only in sewer pipes, but also to inspect the thin pipes in chemical factories. We are currently at the proof-of-concept stage. Our goal is to produce a commercial product through the startup Solaris Inc. that I founded in the 2022 academic year. If we are successful at commercialization, it will be the world’s first earthworm-type inspection robot.
——ソラリスを起業したのはなぜですか?
Q: Why did you start Solaris?
中村:当研究室では多くの企業などと共同研究を行なっていますが、新しい技術が生まれにくいと感じることがありました。典型的な例は、共同研究先の企業での方針転換です。また、研究という位置付けなので、長期スパンで取り組めるというメリットがある一方で、必ずしも実用化につながらなくてもいいわけです。
Nakamura: My laboratory is engaged in joint research with many companies and other entities, but I’ve sometimes found it difficult to create new technologies. A typical example is when a company we’re working with changes their direction. Also, since what we do is positioned as research, we have the advantage of being able to work over a long period of time. However, this does not necessarily lead to anything practical.
自分たちでプロダクトを作り、求められている場所に売っていこうと考えたときには、起業するのが最適だと考えました。スタートアップ企業なら、研究シーズを工業技術として製品化することが目標になりますからね。
When I considered making my own product and finding a market for it, I thought it would be best to start a business. As a start-up, the goal is to take seeds from research and use them to create commercial industrial technology.
学術研究と応用研究は両立できる
Academic research and applied research can be compatible
——研究で難しいと感じるのはどんなときですか?
Q: When are the difficult times in your research?
中村:ミミズ型ロボットで言うと、エルボ管という90度カーブを進むのがかなり難しかったです。しっかり進もうとするとある程度の硬さが必要ですが、硬すぎると進まない。このせめぎ合いが、柔らかいロボットのミソとなります。ただの微調整で済ませるのではなく、学生と議論して理論的に解決していくことが必要です。
Nakamura: For the earthworm-type robots, it was quite difficult to get them through a 90º curve called an elbow. The robot needs a certain amount of hardness to proceed steadily, but if it’s too hard, it won’t move. This balance is the beauty of soft robots. This isn’t something that could be solved with fine-tuning. I had to discuss it with my students to find a theoretical solution.
例えば、学生と一緒に実地試験をやったときには、1回目はあまりうまくいかず、2回目も目標地点に届かなかったので、配管の実物を取り寄せて課題を一つずつクリアしていきました。実は、その中で特許が2つ生まれ出願しました。ソラリスという技術移転の受け口があるので、そこに向かっていけばいいという良い経験になっています。
For example, in a field test I did with my students, the first time didn’t go very well and in the second attempt we didn’t reach the target, so I ordered some actual piping, and we overcame the hurdles one by one. In fact, I applied for two patents out of that process. Now that I have a technology transfer outlet in Solaris, I decided to send the technology there, which was a good experience.
また、共同研究の中で発見できたことを論文で発表することもあります。少なくともロボット領域では、学術研究と応用研究は両立できます。
We’ve also published articles about discoveries made during joint research projects. At least in the field of robotics, academic and applied research can coexist.
—— 実地試験ができるのは、学生にとっても貴重な経験になりそうですね。
Q: Is being able to take part in field tests is a valuable experience for students?
中村:その通りです。実地試験では、失敗しても対策することで多くのことを学べます。ロボット領域で実地試験をすることはあまりないので、学生の教育としても役立っています。実地試験をやってみたいという学生が当研究室に多くやってきますね。
Nakamura: It sure is. In field tests, even if you fail you learn a lot by dealing with the things that come up. Because field tests aren’t that common in robotics, they are also useful for educating students. My laboratory has a lot of students who really want to do field tests.
「ロボットが社会に求められている」を実感できるから依頼は断らない
Requests show me that robots are needed by society, so I don’t turn them down
——中村先生の研究室では、これまで70〜80の共同研究を行い、現在も約20の共同研究が進行中だと聞きました。企業からはどのような要望があって共同研究を始めるのですか?
Q: I’ve heard your laboratory has participated in 70 to 80 joint research projects so far, with about 20 currently underway. What kind of requests do you get from companies that leads to joint research?
中村:2パターンあります。1つは、人工筋肉を使って何か面白いことをやってみたいという、フワッとした相談です。その場合にはゼロベースで私から提案し、相手が面白そうだと思ったものについて進めていく、というやり方になります。
Nakamura: There are two patterns. The first involves kind of vague meetings, like, “Creating artificial muscles sounds interesting. I’d like to try.” In these cases, I make zero-base proposals from me, and we proceed with what the other party finds interesting.

An artificial muscle unit used in peristaltic pumps that expands and contracts using air pressure.
もう1つは、具体的な課題がすでにあって、それを解決したいところから相談を受けるパターンです。例えば、宇宙航空研究開発機構(JAXA)を共同で進めた月の地中探査用ミミズ型ロボットがあります。普通の掘削ロボットでは、ロボットの側面を掘削孔の壁面にこすりつけながら進むために土からの圧力(土圧)を受けやすく、深く掘れません。ミミズ型ロボットの蠕動運動なら、掘削孔の壁面にこすることなく進むため、土圧の影響を受けにくくなり、深くまで行けます。同じ方法で、海底や北極の氷も掘ることができると考えています。
The other pattern is when the other party already has a specific problem, so they solicit meetings with the aim of solving it. An example of this is an earthworm-type robot for underground exploration on the moon, which we’ve been working on with the Japan Aerospace Exploration Agency (JAXA). With regular excavation robots, the side of the robot rubs against the wall of the excavation, which makes it susceptible to pressure from the soil (earth pressure) that prevents it from digging deeply. Peristaltic movement allows earthworm-type robots to move without rubbing against the walls of an excavation, making them less susceptible to earth pressure and allowing them to go deeper. We believe the same method could be used to dig into seabeds and Arctic ice.
——先生の研究室では、ミミズ型ロボット以外にも、人間の腸の動きを再現した蠕動運動ポンプも開発していますよね。蠕動運動ポンプを使った共同研究にはどのようなものがありますか?
Q: In addition to earthworm-type robots, your laboratory is also developing a peristaltic pump that mimics the movements of the human intestinal tract. What kinds of joint research are you pursuing on peristaltic pumps?
中村:これもJAXAからの依頼で始まったもので、固体ロケットの燃料を作る装置があります。固体ロケットの燃料は、いくつかの粉体と液状ゴムを混ぜて作るのですが、作り方が難しくて人の手でやっていたそうです。蠕動運動ポンプなら、固体と液体を混ぜながら送り出すことができます。
Nakamura: This also started with a request from JAXA. This time for a device to manufacture fuel for solid rockets. The fuel for solid rockets is made by mixing several kinds of powder with liquid rubber, but it is difficult to do and is normally performed manually. A peristaltic pump could deliver the solids and liquids while mixing them together.
また、宇宙飛行士の長期滞在を想定するなら、排泄物を再利用するゼロエミッションという考え方があります。蠕動運動ポンプを使って便などを撹拌しながら嫌気性発酵を行って肥料や食料にできるかもしれません。
There is also the concept of “zero emissions” for astronauts who stay for long periods in outer space, which involves reusing their excretions. It may be possible to create fertilizer or food through anaerobic fermentation while mixing feces using a peristaltic pump.
——本当にいろんな応用先があり得るのですね。
Q: There really are all kinds of possible applications.
中村:こういうことは一人では思いつかないからこそ楽しいと思っています。JAXAからの固体ロケットの燃料など、私が当初想定していなかった用途や分野からの提案も来ます。保険会社や不動産会社など、大学と共同研究したことのない企業からの依頼もあります。ビルのメンテナンスなどでミミズ型検査ロボットに関心があるようです。
Nakamura: It’s fun because there’s no way I would have thought of these things on my own. We get proposals involving applications and fields that I never would have envisioned, like the solid rocket fuel idea from JAXA. I also get requests from companies that have never engaged in joint research with universities, such as insurance providers and real estate companies. They are interested in earthworm-type inspection robots for things like building maintenance.
——それだけ依頼が多いと、断るということはあるのですか?
Q: You get so many requests. Do you ever say no?
中村:いいえ、基本的に断ることはないですね。まずはやってみるというノリでやっています。幅広い分野でプロジェクトを組んで、新しいものを生み出していくのはやはり面白いですね。
Nakamura: Never. Basically, I don’t refuse anything. A spirit of “Well, let’s give it a try” keeps everything together. It’s just so interesting to create new things by working on projects in a wide range of fields.
——面白いということですが、企業と一緒に研究していく上で研究者としての喜びには何がありますか?
Q: You say it’s interesting. But as a researcher, what is the most fun about working with companies?
中村:3段階あります。まず、原理を発見したとき。ミミズ型ロボットなら、ミミズの動きを真似したロボットを作ってみようと思ったときです。2番目が、ミミズ型ロボットがちゃんと動いて、その原理を実証できたとき。3番目が、共同研究によって、その成果が製品化されたときです。3番目は、ロボット研究者ではあまりいないと思います。私もまだですが、ソラリスを通じてもう少しで経験できると思います。
Nakamura: There are three stages. The first is when I discover a principle. For earthworm-type robots, it was when I thought of making a robot that could imitate the movements of earthworms. The second is when I demonstrate the principle in practice. Like when I got an earthworm-type robot to move properly. The third is when the findings are turned into a product through joint research. I don’t think many robot researchers have reached the third stage. I haven’t yet either, but I think I can experience it a little through Solaris.
企業と一緒にやることの楽しさでいえば、「ロボットが社会に求められている」ということを実感できるのは大きいポイントです。学生だけでなく、私も「研究しているロボットは本当に社会で役に立つのか」と不安に思うときが正直あります。でも、共同研究や実地試験を通じて技術を磨き、課題をクリアできた瞬間はやはり感動します。
The fun thing about working with companies is the ability to really feel that robots are needed by society. To be honest, both my students and I sometimes worry whether the robots we study will actually be useful to society. Nevertheless, after improving technology through joint research and field tests, the moment when I solve a problem is exciting.
もちろん、製品化の難しさはわかっています。完成させるだけでなく、耐久性はどうか、採算は合うのかなど、研究とは違うハードルを超えないと事業化できません。でも、ミミズ型ロボットと蠕動運動ポンプなら、事業化できると私は信じています。
Of course, I now know how difficult it is to commercialize something. Commercialization doesn’t just mean completing something. It involves overcoming hurdles that are different from those I face during research, such as regarding durability and profitability. Still, I believe commercialization is possible for earthworm-type robots and peristaltic pumps.
Prof. Nakamura sometimes smiles while he speaks.
柔らかいロボットとAIの融合も目指して
Fusion of soft robots and AI
——今後、柔らかいロボットの研究はどのような方向に進んでいくのでしょうか? 例えば、人工知能(AI)などの新しい技術や風潮が入ってくるのでしょうか?
Q: What direction will research on soft robots go in the future? For example, will you introduce new technologies or trends, like artificial intelligence (AI)?
中村:ミミズ型ロボットに関しては、今まで調べることができなかった未踏エリアのデータを集め、そのデータをAIに処理させて活用できるかもしれません。ミミズ型ロボットが集めた画像から、下水管の破損をAIで判断できる可能性はあると思います。
Nakamura: For earthworm-type robots, it may be possible to collect data on unexplored areas that were previously impossible to investigate, and then let AI process that data for use. I think it would be feasible for an AI to assess damage to sewer pipes based on images collected by earthworm-type robots.
——AIを使って何かをするのではなく、AIのもととなるデータをミミズ型ロボットが集めてくる、ということですね。
Q: That means the earthworm-type robots would collect the data to create an AI, instead of doing something using AI.
中村:そうです。データを集めるというインフラの基本的課題が、ミミズ型ロボットに託されています。
Nakamura: That’s right. The basic infrastructure work of collecting the data would be entrusted to earthworm-type robots.
一方、蠕動運動ポンプについては、AIを使って制御できると思います。ポンプで送っている搬送物の温度や粘度に合わせて流量や流速を自動で調節することは可能でしょう。人間の腸も腸管神経系によって自律的にコントロールされているので、蠕動運動ポンプが巨大なAIとして動くことも将来的にやっていきたいです。
On the other hand, I think peristaltic pumps could be controlled using AI. It could be possible to automatically adjust the amount and speed of the substances being transported based on their temperature and viscosity. Just like the human intestinal tract is autonomously controlled by the enteric nervous system, in the future I would like to see peristaltic pumps move as a kind of giant AI.
柔らかいロボットは同じユニットの繰り返しというシンプルなシステムなので、センシングによって多くのデータを得ることができます。AIは大量のデータ処理が得意なので、柔らかいロボットとAIは融合しやすいと思います。
Because a soft robot is a simple system made of multiple identical units, sensors can collect a lot of data. And because AI is good at processing large amounts of data, I think it will be easy to combine soft robots and AI.
——柔らかいロボットには、まだ中村先生が想像もしないような使い方がありそうですね。共同研究を通じて柔らかいロボットの新しい姿が見える日を楽しみしています!
It seems like soft robots will be able to be used in ways that even you can’t imagine. We are looking forward to seeing new versions of robots that come out of joint research projects!
Photographer:Kato Hajime Writer & Editor:島田祥輔