













Research 01
センサによる観測とAIによる理解,そして人への働きかけを実現するプロセス
「空間知能化」で3次元空間をもっと活用
Process of observation with sensors, understanding through AI, and applying to people
Maximize the use of 3D space with “spatial intelligence”

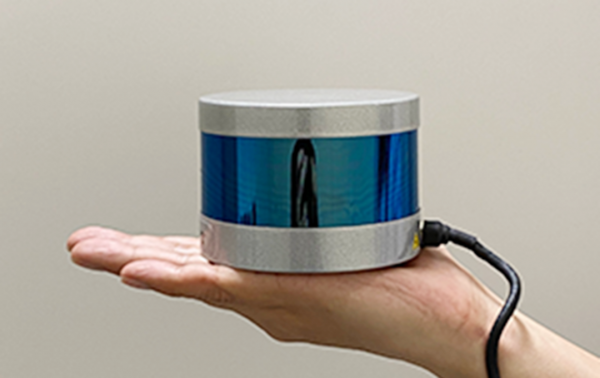
空間知能化ではリモコンのようなデバイスを介さずに3次元空間を活用します。そこで重要となるのがセンサによる観測とAIによる状況理解です。最近では、自動運転車に利用される走行空間センサを用いて人の位置、歩行のデータを計測・蓄積し、環境地図上で可視化。オフィスや公共空間で3密状況の検出、密になりやすいエリアの自動抽出に応用されています。歩行状況の解析では、うろうろとした異常な歩行を識別し、3次元計測からうずくまりなどの異変も検出。カメラと異なり個人を直接識別せず、プライバシーも守られます。
Spatial intelligence utilizes three-dimensional (3D) space without a device such as a remote control. Therefore, observation with sensors and understanding the situation using AI are important. Recently, self-driving cars with driving space sensors were used to measure and accumulate data on the location of people walking. The results were visualized on an environmental map. This has been applied to 3C environments, consisting of closed spaces, crowded places, and close-contact settings, such as offices and public spaces, to automatically extract areas that tend to be dense. In the analysis of walking conditions, the system identifies unusual walking behavior, such as loitering, and also detects abnormalities, such as huddling, from 3D measurements. Unlike cameras, the system does not directly identify the individual, so privacy is protected.
この研究が世の中にもたらす可能性
Research Possibilities: what the research create to the World
建設・設備関連業界、医療・福祉関連業界
施設の利用状況をリアルタイムに定量化して可視化可能。人の移動、滞在から店舗やオフィスの活用状況を定量的に評価できます。病院や介護施設内でのうろうろ状況やうずくまりなど通常と異なる歩行が観測された場合も即座に検出、通知が可能です。
Construction and equipment-related industry, and medical and welfare related industry
Facility usage can be quantified and visualized in real time. The utilization status of stores and offices can be quantitatively evaluated from the movements and stays of people. The system can also immediately detect when unusual walking behavior is observed, such as loitering or hovering in hospitals and nursing homes, and send notifications.
これまでの産学官連携事例
Collaborations
株式会社
日経リサーチ
Nikkei Research Inc.
2019/2 –
様々な環境下でのLiDARを用いた環境地図の構築
Construction of environmental maps using LiDAR in various environments
実績
Achievements
2021
論文|Journal
HARChuo(新妻研学生チーム), “Intelligent Convenience Store,” World Robot Summit, Future Convenience Store Challenge, Customer Interaction Task競技, 2019 プレ大会,2020本大会(実施は2021年),第1位(空間知能化技術と人・ロボットコミュニケーション技術を統合したサービス提案)
2021
論文|Journal
Kanon Fujino and Mihoko Niitsuma, “Effects of Presenting People Flow Information by Vibrotactile Stimulation for Visually Impaired People on Behavior Decision”, Journal of Robotics and Mechatronics Vol.33 No.1, pp.97-107, 2021
2019/9/11
著書|Book
上出寛子,新井健生,福田敏男 編著(新妻実保子 著 4章),『今日、僕の家にロボットが来た。未来に安心をもたらすロボット幸学との出会い』,北大路書房
2019
論文|Journal
Takumi Nishio, Mihoko Niitsuma, “Environmental Map Building to Describe Walking Dynamics for Determination of Spatial Feature of Walking Activity”, The 28th IEEE International Symposium on Industrial Electronics, pp. 2515-2520, 2019.
2015
論文|Journal
Soh Takahashi, Gacsi Marta, Peter Korondi, Hideki Hashimoto, Mihoko Niitsuma, “Leading a Person Using Ethologically Inspired Autonomous Robot Behavior,” 10th ACM/IEEE International Conference on Human-Robot Interaction (HRI2015) (HRI2015 Best Late Breaking Report Award 受賞)
2012
論文|Journal
Syo Hiroi and Mihoko Niitsuma, “Building a Map including Moving Objects for Mobile Robot Navigation in Living Environments”, in Proc. of the Ninth International Conference on Networked Sensing Systems (INSS2012), poster, 2012. 6.11-14. Antwerp, Belgium. (INSS2021 Best Poster Award 受賞)
2010
論文|Journal
Mihoko Niitsuma, Terumichi Ochi, Masahiro Yamaguchi, and Hideki Hashimoto, “Interaction between a User and a Smart Electric Wheelchair in Intelligent Space”, in Proceedings of the 2010 International Symposium on Micro-NanoMechatronics and Human Science (MHS2010), pp. 465- 470, 2010.11, Nagoya. (MHS2020 Best Paper Award受賞)
2009/3
著書|Book
新妻実保子, 橋本秀紀, “空間の観測に基づく人間の活動支援”, エレクトロニクスシリーズ「ヒューマンインタフェースのための計測と制御」(監修:山口昌樹)第17章, pp. 211-226, シーエムシー出版, 2009.3
2006/4
論文|Journal
新妻実保子, 橋本洋志, 橋本秀紀, “空間メモリ:知識活用を支援する空間知能化”, 計測自動制御学会論文誌,第42巻4号, pp.367-375, 2006.04. (計測自動制御学会 論文賞受賞)
経歴
Career
2007/9
東京大学 工学系研究科 電気系工学専攻 博士後期課程 修了
Completed the Doctoral program at the Department of Electrical Engineering, Graduate School of Engineering, The University of Tokyo
2007/4-2009/3
日本学術振興会特別研究員(東京大学生産技術研究所橋本研究室)
Japan Society for the Promotion of Science Research Fellowship for Young Scientists (Hashimoto Laboratory, The University of Tokyo Institute of Industrial Science)
2007/10-2008/1
ブダペスト工科経済大学客員研究員
Visiting Researcher, Budapest University of Technology and Economics
2009/4-2013/3
中央大学理工学部精密機械工学科助教
Assistant Professor, Department of Precision Mechanics, Faculty of Science and Engineering, Chuo University
2010/5-2011/5
ブダペスト工科経済大学客員研究員
Visiting Researcher, Budapest University of Technology and Economics
2013/4-2021/3
中央大学理工学部准教授
Associate Professor, Faculty of Science and Engineering, Chuo University
2016/3-2017/3
コロンビア大学ティーチャーズカレッジ
Teachers College, Columbia University
2021/4-present
中央大学理工学部教授
Professor, Faculty of Science and Engineering, Chuo University
Photographer:Kato Hajime Editor:Akina Horikawa